
'%3e%3ccircle%20cx='1.975536'%20cy='1.975536'%20fill='%23000'%20r='1.975536'/%3e%3ccircle%20cx='13.433644'%20cy='1.975536'%20fill='%23000'%20r='1.975536'/%3e%3cpath%20d='m4.95107171%205.58598549s2.296875%201.96875%205.24999999%200'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20stroke-width='2'/%3e%3c/g%3e%3c/svg%3e)
FastLED: Linear Interpolation
e.g.
i.e.
e.g.
i.e.
i.e.
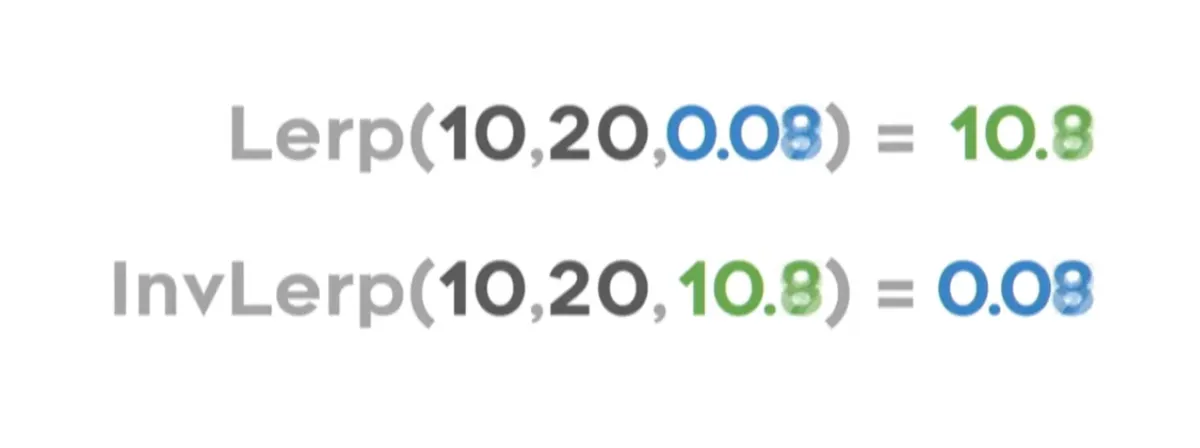
The function to do this is called inverse interpolation, or InvLerp()
// takes in a value between a and b, and spits out
// a fraction between 0 and 1, proportional to a and b
// InvLerp(10, 20, 10.8) = 0.08
float InvLerp( float a, float b, float v ) {
return ( v - a ) / ( b - a );
}
But first, there is one Arduino-robotics-example complication to resolve...




After all, map is actually just an InvLerp() and a Lerp() function glued together.
The next step (following this process anyway) is to break that map up, and interpolate input and output separately
float map( float v, float iMin, float iMax, float oMin, float oMax ) {
float t = InvLerp( iMin, iMax, v );
return Lerp( oMin, oMax, t );
}
It is the fastest way to test if and how our microcontroller is, in fact, controlling the movement of our mover.
Whenever I start working with some kind of motion animation, I always end up starting with a map() function
float position = 0.8 means 80% of the way between whatever our minimum and maximum range is for our application
1.0 max
179 max
From here on out, when you see input or position, they are fractions between 0 and 1.
If you want to learn more about linear interpolation (and it is an important subject for animation!) please see these videos and articles
// takes in values a and b, and a fraction between 0 and 1 t,
// and returns a value between a and b, proportional to t
// Lerp(10, 20, 0.08) = 10.8
float Lerp( float a, float b, float t ) {
return ( 1.0f - t ) * a + b * t;
}
0.527 input
Likewise, we store position as a fraction between 0 and 1 and translate it to whatever range our mover requires
The function to do this is called linear interpolation or Lerp()
(34 - -128) / (179 - -128)
34 sensor input
Regardless of how we receive our raw input, we translate that to a fraction between 0 and 1 and store it as input
NUM_LEDS
The upshot of this process
0.0 min
179
166
And we take that and convert it to whatever range our particular kind of system accepts.
-128 min
We do the same for position: we store a value between 0 and 1 for it
34
0
leds[] pixel coordinate range:
-128
Specifically, we will translate input into a float to store a value between 0 and 1
accel_x range (from accelerometer):
Instead, we want to take whatever value from whatever range in input and convert it to a predictable range
credit to Freya Holmer

But! If we do that, then position will always map rigidly to our input value, with no room for personality or character of movement
wouldn’t it be great to just store that relative position and work with that?
notice how they are both about 66% of the way between their ranges?
Actually, probably not all of this and I should just put this into its own space and reconsider it
and this is our position
if this is our input
val = map(val, 0, 2048, 0, 180);
In lots of Arduino tutorials, we solve that using a function called map() to connect the two values
180
70
0
In order to control movement with these ranges, we have to be able to compare them.
Rework this part with someone to make it clear what I am trying to say and why
servo angle position range
2048
798
0
And the position parameters for different kinds of movers will be, well, different
analogRead() input range:
Sensor values will arrive in all sorts of ranges out of our control




'%3e%3cpath%20d='m0%205.5h10'/%3e%3cpath%20d='m0%205.5h10'%20transform='matrix(0%201%20-1%200%2010.5%20.5)'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m0%205.5h10'/%3e%3cpath%20d='m0%205.5h10'%20transform='matrix(0%201%20-1%200%2010.5%20.5)'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m0%202h3'/%3e%3cpath%20d='m1.5%200%202%202.07267853-2%201.92732147'/%3e%3c/g%3e%3cg%20stroke-linecap='round'%20transform='matrix(0%20-1%201%200%208.5%2010.5)'%3e%3cpath%20d='m0%202h3'/%3e%3cpath%20d='m2%200%202%202.07267853-2%201.92732147'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)









'%3e%3cpath%20d='m.5%201.5h4'/%3e%3cpath%20d='m3.6798438%200%201%201.55267816-1%201.44732184'/%3e%3c/g%3e%3cpath%20d='m3.3%203.3h6.7c.5522847%200%201%20.44771525%201%201v.2c0%20.55228475-.4477153%201-1%201h-6.7z'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'%20transform='matrix(.70710678%20-.70710678%20.70710678%20.70710678%20-1.017083%206.344544)'/%3e%3cpath%20d='m3.66310703%206.58754045c-.68349521-.34174757-1.36699042-.17087378-2.05048562.51262136-1.02524282%201.02524272-.55%202.83721683-1.06262141%203.34983819%200%200%202.60048562.7511327%203.62572843-.27411.68349521-.68349518.94158573-1.50879183.77427157-2.47589'%20fill='%23000'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'%20transform='translate(6.860078%207.1901)'%3e%3cpath%20d='m0%201.5h4'/%3e%3cpath%20d='m3.1798438%200%201%201.55267816-1%201.44732184'/%3e%3c/g%3e%3cpath%20d='m2.75000032%202.40017856h6.69999998c.5522847%200%201%20.44771525%201%201v.2c0%20.55228475-.4477153%201-1%201h-6.69999998z'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'%20transform='matrix(.70710678%20-.70710678%20.70710678%20.70710678%20-.541905%205.692083)'/%3e%3cpath%20d='m3.11310703%205.68771866c-.68349521-.34174757-1.36699042-.17087379-2.05048562.51262136-1.02524282%201.02524272-.55%202.83721683-1.06262141%203.34983819%200%200%202.60048562.75113269%203.62572843-.27411.68349521-.68349518.94158573-1.50879183.77427157-2.47589'%20fill='%23000'%20fill-rule='nonzero'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3cpath%20d='m3.66310703%206.58754045c-.68349521-.34174757-1.36699042-.17087378-2.05048562.51262136-1.02524282%201.02524272-.55%202.83721683-1.06262141%203.34983819%200%200%202.60048562.7511327%203.62572843-.27411.68349521-.68349518.94158573-1.50879183.77427157-2.47589'%20fill='%23000'/%3e%3cpath%20d='m3%2010.1c-.38138877.1906944%203-1.1%204-.6.66666667.33333333%201.66666667%200%203-1'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/svg%3e)



'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'%3e%3crect%20height='12'%20rx='2'%20width='12'/%3e%3cpath%20d='m.5%203.5h11'/%3e%3c/g%3e%3cpath%20d='m2%200h8c1.1045695%200%202%20.8954305%202%202v2h-12v-2c0-1.1045695.8954305-2%202-2z'%20fill='%23000'/%3e%3c/g%3e%3c/svg%3e)





'%3e%3cpath%20d='m3.48809814%200h5.01190186c1.9329966%200%203.5%201.56700338%203.5%203.5v1.58608772c0%201.93299662-1.5670034%203.5-3.5%203.5h-3.3717084l-1.85556433%202.41391228-1.09090909-2.41391228-.96301826-.71057931c-.7664577-.56554379-1.21879992-1.46146407-1.21879992-2.41398556v-1.97342471c0-1.92642341%201.56167473-3.48809814%203.48809814-3.48809814z'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'/%3e%3cg%20fill='%23000'%3e%3ccircle%20cx='3'%20cy='4.5'%20r='1'/%3e%3ccircle%20cx='6'%20cy='4.5'%20r='1'/%3e%3ccircle%20cx='9'%20cy='4.5'%20r='1'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)



'/%3e%3c/svg%3e)
'%3e%3cpath%20d='m6.21099124%200%202.12659474%203.12659474h-8.33758598'/%3e%3cpath%20d='m5.8644069%200%202.1355931%203h-8'%20transform='matrix(-1%200%200%20-1%207.973179%208.5)'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)
'%3e%3cpath%20d='m-1.24410716%207.56519899c1.04742679-.69426478%201.52982145-2.12251507%201.52982145-3.56519899s-.48239466-2.87093421-1.52982145-3.56519899c.54485584-.27801557%201.16188619-.43480101%201.81553573-.43480101%202.209139%200%204%201.790861%204%204s-1.790861%204-4%204c-.65364954%200-1.27067989-.15678544-1.81553573-.43480101z'%20fill='%23000'%20transform='matrix(-1%200%200%20-1%204.571428%208)'/%3e%3ccircle%20cx='4'%20cy='4'%20r='4'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)
'%3e%3cpath%20d='m-.13804776%207.9372722c1.66967842-.35230709%202.42376205-2.13350825%202.42376205-3.9372722s-.75408363-3.58496511-2.42376205-3.9372722c.23026315-.0412162.46735759-.0627278.70947633-.0627278%202.209139%200%204%201.790861%204%204s-1.790861%204-4%204c-.24211874%200-.47921318-.0215116-.70947633-.0627278z'%20fill='%23000'%20transform='matrix(-1%200%200%20-1%204.571428%208)'/%3e%3ccircle%20cx='4'%20cy='4'%20r='4'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20stroke-linecap='square'%3e%3crect%20fill='%23000'%20height='3.666667'%20rx='1.5'%20width='4'%20x='1'/%3e%3cpath%20d='m8.5.5%203%203'/%3e%3cpath%20d='m8.5.5%203%203'%20transform='matrix(0%201%20-1%200%2012%20-8)'/%3e%3c/g%3e%3cg%20transform='translate(.7%206)'%3e%3cpath%20d='m2.5%202.5v2'%20stroke-linecap='square'/%3e%3cpath%20d='m2.5%202.5%202-2'/%3e%3cpath%20d='m.5%202.5%202-2'%20transform='matrix(-1%200%200%201%203%200)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m3%200h6v6h-6z'/%3e%3cpath%20d='m6%207.5v1.5h-6v-6h1.5'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20cx='1.5'%20cy='6'%20r='1.5'%20stroke-linecap='square'/%3e%3ccircle%20cx='1.5'%20cy='1.5'%20r='1.5'%20stroke-linecap='square'%20transform='rotate(180%201.5%201.5)'/%3e%3cpath%20stroke-linecap='round'%20d='M3%205.268L11.91.951M3%202.732l8.91%204.317'/%3e%3c/g%3e%3c/svg%3e)



'%3e%3ccircle%20cx='3'%20cy='3'%20r='3'/%3e%3cpath%20d='m11.6%200%203.6%206h-7.2z'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m.5%204.95999926c.80476436-1.59325218%201.72466915-2.38987827%202.75971436-2.38987827h5.24028564'/%3e%3cpath%20d='m6.4848272%200%202.0151728%202.57012099-2.0151728%202.38987827'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20cx='6'%20cy='6'%20r='6'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'/%3e%3cg%20fill='%23000'%3e%3cpath%20d='m3.81818182%207.63636364s.54545454%201.63636363%202.18181818%201.63636363%202.18181818-1.63636363%202.18181818-1.63636363z'%20stroke='%23000'%20stroke-linecap='round'%20stroke-linejoin='round'/%3e%3ccircle%20cx='3.818182'%20cy='4.363636'%20r='1.090909'/%3e%3ccircle%20cx='8.181818'%20cy='4.363636'%20r='1.090909'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20stroke-linecap='square'%3e%3cpath%20d='m0%205.5h6v3h-6z'/%3e%3cpath%20d='m.5%205%204.5-4.5'/%3e%3cpath%20d='m6.5%205%204.5-4.5'/%3e%3c/g%3e%3cpath%20d='m6%208.5%205.5-5.5v-3h-6'%20stroke-linecap='round'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m8%202.46575459v6.53424541h-8v-9h5.33544759z'%20stroke-linecap='square'/%3e%3cpath%20d='m5.33544759%200v2.73972732h2.66455241'/%3e%3cg%20stroke-linecap='round'%3e%3cpath%20d='m1.5%202.5h2'/%3e%3cpath%20d='m1.5%204.5h4'/%3e%3cpath%20d='m5.5%204.5h1'/%3e%3cpath%20d='m5.5%206.5h1'/%3e%3cpath%20d='m1.5%206.5h2'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'/%3e%3crect%20height='4.363636'%20rx='.5'%20width='1.090909'%20x='5.454545'%20y='5.454545'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m8.93959492%206.58245207c-1.10569144%200-2.10974996.46182439-3.02339821%201.35711742.91364825.89534389%201.91770677%201.35716829%203.02339821%201.35716829%201.10561608%200%202.10961298-.4617614%203.02321128-1.35693423-.9133243-.89546408-1.9174444-1.35735148-3.02321128-1.35735148z'%20stroke='%23000'%20transform='matrix(.70710678%20-.70710678%20.70710678%20.70710678%20-2.995795%208.646702)'/%3e%3cpath%20d='m3.93959492%206.58245207c-1.10561603%200-2.10961299.4617614-3.02321126%201.35693423.91332433.89546408%201.9174444%201.35735148%203.02321126%201.35735148%201.10561603%200%202.109613-.4617614%203.02321127-1.35693423-.91332433-.89546408-1.9174444-1.35735148-3.02321127-1.35735148z'%20stroke='%23000'%20transform='matrix(-.70710678%20-.70710678%20-.70710678%20.70710678%2012.339451%205.111168)'/%3e%3cpath%20d='m6.50001074%205.6c2.20913222%200%203.49998926-1.54289563%203.49998926-3.44615385%200-1.10824993%200-2.15384615-.5-2.15384615-.33333333%200-.83333333.43076923-1.5%201.29230769-.66666667-.86153846-1.16666309-1.29230769-1.49998926-1.29230769-.33376898%200-.83376744.43076923-1.4999954%201.29230769-.66666462-.86153846-1.16666308-1.29230769-1.4999954-1.29230769-.50001994%200-.50001994%201.4190517-.50001994%202.15384615%200%201.90325822%201.29087852%203.44615385%203.50001074%203.44615385z'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m3.32914689%209.75289602h.7565577c.24839204-.0147988.38278051-.02457717.4031654-.0293351%201.16154089-.27110952%201.48432098-.66403845%202.18198312-1.22356092.66226899-.5311373.70308671-.69508684%201.11584772-1.12911838.30177194-.31732294.90263813-.969681%201.80259859-1.95707418.09393236-.52119243.01353812-.89615922-.24118271-1.12490037-.25472083-.22874114-.57694888-.29225148-.96668414-.19053102l-1.29419358%201.09300041'/%3e%3cpath%20d='m5.30524166%203.02854316v-1.41982357c0-.48824872.39580379-.88405251.88405251-.88405251.00231541%200%20.00463082.0000091.00694616.00002729.49321336.00387539.89099866.40479853.89099866.89802712v3.4838213'/%3e%3cpath%20d='m3.48847922%204.0467801c0-1.04613296%200-2.09226592%200-3.13839888%200-.50168509.40669612-.90838122.90838122-.90838122s.90838122.40669613.90838122.90838122v3.09161878'/%3e%3cpath%20d='m1.66457345%203.33192247c0-.57313929%200-1.14627858%200-1.71941787%200-.48645753.39435174-.88080928.88080927-.88080928.49078883%200%20.892832.3898351.90796099.88039069.01171184.37975477.02342367.75950954.03513551%201.13926431'/%3e%3cpath%20d='m3.32914689%209.75289602c-.50881236%200-1.44855803-.51409483-1.82914689-.75289602s-.87764481-.70491382-1.12324045-1.1652062c-.09169685-.17185714-.17142974-.34692425-.23919865-.52520132-.09094833-.2392401-.1375609-.49304454-.1375609-.74898872v-3.97542101c0-.45965927.37262746-.83228673.83228672-.83228673.45965927%200%20.83228673.37262746.83228673.83228673v1.46622694'/%3e%3c/g%3e%3c/svg%3e)


'%3e%3crect%20width='3'%20height='3'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20y='5'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='5'%20y='5'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='5'%20rx='1'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m7.73400827.5c.63670388%200%201.23536393.30315947%201.61216661.81639584l2.15382512%202.9336877v2.24991646c0%20.41421356-.1678932.78921356-.4393398%201.06066017s-.6464466.43933983-1.0606602.43933983h-8c-.41421356%200-.78921356-.16789322-1.06066017-.43933983s-.43933983-.64644661-.43933983-1.06066017v-2.24565304l2.15402431-2.93712235c.37675304-.51372204.97570867-.81722461%201.61277475-.81722461z'/%3e%3cpath%20d='m1.5%204h2.5v.40066689c0%20.55228475.44771525%201%201%201h2c.55228475%200%201-.44771525%201-1v-.40066689h2.5'%20stroke-linecap='square'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m-0%20590.768c0-79.756%2064.654-144.41%20144.41-144.41%2079.755%200%20144.41%2064.654%20144.41%20144.41s-64.655%20144.41-144.41%20144.41c-79.756%200-144.41-64.654-144.41-144.41z'%20fill-rule='nonzero'/%3e%3cpath%20d='m446.362%20144.41c0-79.756%2064.655-144.41%20144.41-144.41%2079.756%200%20144.41%2064.654%20144.41%20144.41%200%2079.755-64.654%20144.41-144.41%20144.41-79.755%200-144.41-64.655-144.41-144.41z'%20fill-rule='nonzero'/%3e%3cpath%20d='m656.412%20421.745c0%20129.603-105.064%20234.667-234.667%20234.667h-54.154v-108.308h54.154c69.786%200%20126.359-56.573%20126.359-126.359v-54.153h108.308z'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m3.99497627%2011.7034752h1.28502373c.80346258-.1186453%201.63722519-.5287155%202.50128784-1.2302106.55236586-.448442.64615115-1.31032471%201.2671486-1.90379388.3815763-.36466134%201.09307236-.97311111%202.13448826-1.82534932.1127189-.62543092.0162458-1.07539106-.2894192-1.34988044-.305665-.27448937-.6923387-.35070178-1.160021-.22863722l-1.22879771%201.06404801c-.5953068%200-1.19610517.17148988-1.80239512.51446965s-1.01811693.75642944-1.23548093%201.240349'/%3e%3cpath%20d='m6.36629%203.71610541v-1.90347265c0-.52133166.42262281-.94395447.94395446-.94395447.0024723%200%20.0049446.00000971.00741682.00002914l.25048786.00196819c.51842153.00407345.93653765.4254878.93653765.94392533v4.3132504'/%3e%3cpath%20d='m4.18617506%204.85613613c0-1.26586871%200-2.53173742%200-3.79760612%200-.58460998.47392003-1.05853001%201.05853001-1.05853001h.06305492c.58460998%200%201.05853001.47392003%201.05853001%201.05853001v2.5883063'/%3e%3cpath%20d='m1.99748814%203.99830697c0-.68776715%200-1.3755343%200-2.06330145%200-.58374904.47322209-1.05697113%201.05697113-1.05697113h.03058346c.57190542%200%201.04039748.45426627%201.05802696%201.0258999.01436846.46589536.02873691.93179073.04310537%201.39768609'/%3e%3cpath%20d='m3.99497627%2011.7034752c-.61057483%200-1.94616461-.2597441-2.40287125-.5463056-.45670663-.2865614-.96879242-.7816526-1.26350718-1.33400347-.19206346-.35996302-.30104485-.86589333-.32694416-1.51779091-.00110723-.028069-.00166118-.05615718-.00165368-.08424801v-5.11890791c0-.55159112.44715295-.99874407.99874407-.99874407s.99874407.44715295.99874407.99874407v1.97511965'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20stroke-linecap='round'%20stroke-linejoin='round'%3e%3cpath%20d='m6%201.5v-1'/%3e%3cpath%20d='m1.646447%202.353553.707106-.707106'%20transform='matrix(-1%200%200%201%204%200)'/%3e%3cpath%20d='m9.646447%202.353553.707106-.707106'/%3e%3cpath%20d='m.5%201.5v-1'%20transform='matrix(0%201%20-1%200%2012%205.5)'/%3e%3cpath%20d='m.5%201.5v-1'%20transform='matrix(0%201%20-1%200%202%205.5)'/%3e%3cpath%20d='m6%2011.5v-1'%20transform='matrix(1%200%200%20-1%200%2022)'/%3e%3cpath%20d='m1.646447%2010.353553.707106-.707106'%20transform='matrix(-1%200%200%20-1%204%2020)'/%3e%3cpath%20d='m9.646447%2010.353553.707106-.707106'%20transform='matrix(1%200%200%20-1%200%2020)'/%3e%3c/g%3e%3ccircle%20cx='6'%20cy='6'%20r='3'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m.63171946%200v5.5c0%201%20.45609351%201.5%201.36828054%201.5h7'/%3e%3cpath%20d='m7%205.0735973%202%201.9809116-2%201.9454911'/%3e%3c/g%3e%3c/svg%3e)

'/%3e%3cpath%20d='m1.5.5c.40850956%200%20.75934157.11093655%201.04789137.34510605%201.00038431-.16809045%201.4313607-.34510605%201.95210863-.34510605.2876184%200%20.52880838.11765101.6970656.32797252.20218461.25273077.3029344.61771283.3029344%201.04702748%200%20.95629318-.88641439%202.09879188-2.49613008%203.46940897-1.67772949-1.46184687-2.50386992-2.55073577-2.50386992-3.46940897%200-.42931465.10074979-.79429671.30293441-1.04702748.16825721-.21032151.40944719-.32797252.69706559-.32797252z'%20transform='matrix(-0%201%20-1%20-0%2012%204)'/%3e%3cpath%20d='m1.5.5c.40850956%200%20.75934157.11093655%201.04789137.34510605%201.00038431-.16809045%201.4313607-.34510605%201.95210863-.34510605.2876184%200%20.52880838.11765101.6970656.32797252.20218461.25273077.3029344.61771283.3029344%201.04702748%200%20.95629318-.88641439%202.09879188-2.49613008%203.46940897-1.67772949-1.46184687-2.50386992-2.55073577-2.50386992-3.46940897%200-.42931465.10074979-.79429671.30293441-1.04702748.16825721-.21032151.40944719-.32797252.69706559-.32797252z'%20transform='matrix(0%201%201%20-0%20-0%204)'/%3e%3cpath%20d='m6%206.94277051v2.5c.38271262%201.66666669%201.38271262%202.49999999%203%202.49999999'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)

'%3e%3cpath%20d='m0%201.666667h3.333333'%20transform='matrix(0%201%20-1%200%203.333334%200)'/%3e%3cpath%20d='m0%201.666667h3.333333'/%3e%3c/g%3e%3cpath%20d='m7.111111%208.222222%203.333333%203.333334'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)

'/%3e%3c/svg%3e)
'%3e%3ccircle%20cx='4.5'%20cy='4.5'%20r='4.5'/%3e%3cpath%20d='m6.50122137.46836703c1.48105666.73658443%202.49877863%202.26525785%202.49877863%204.03163297s-1.01772197%203.29504854-2.49877863%204.03163297c-1.48303706-.73589006-2.50122137-2.26485667-2.50122137-4.03163297%200-1.70419294.94732892-3.18712536%202.34411129-3.95092178z'%20fill='%23000'/%3e%3ccircle%20cx='8.5'%20cy='4.5'%20r='4.5'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)


'%3e%3cpath%20d='m0%200%202.828427%202.828427'/%3e%3cpath%20d='m0%200%202.828427%202.828427'%20transform='matrix(-1%200%200%201%202.828428%200)'/%3e%3c/g%3e%3cg%20stroke-linecap='square'%3e%3cpath%20d='m8%203v7'/%3e%3cpath%20d='m2%208.5v1.5'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20stroke-linejoin='bevel'%20d='M5.673%200c1.325%201.293%202.182%203.352%202.182%205.672s-.857%204.38-2.182%205.673c-1.326-1.294-2.182-3.353-2.182-5.673%200-2.263.815-4.278%202.085-5.576z'/%3e%3ccircle%20cx='5.618'%20cy='5.618'%20r='5.618'%20stroke-linejoin='round'/%3e%3cpath%20stroke-linejoin='round'%20d='M11.127%205.455H.218'/%3e%3c/g%3e%3c/svg%3e)


'%3e%3cpath%20d='m.94974747%203.44974747h9.50000003v3h-9.50000003c-.82842713%200-1.5-.67157288-1.5-1.5%200-.82842713.67157287-1.5%201.5-1.5z'%20transform='matrix(.70710678%20.70710678%20-.70710678%20.70710678%204.949747%20-2.050252)'/%3e%3cpath%20d='m7.94974747%209.94974747%203.00000003%201.00000003-1.00000003-3.00000003z'%20fill='%23000'/%3e%3cpath%20d='m1.949747%203.949747%202-2'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3crect%20width='3'%20height='3'%20x='2'%20y='2'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='2'%20y='7'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='2'%20y='12'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='7'%20y='7'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='7'%20y='12'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='3'%20height='3'%20x='7'%20y='2'%20stroke-linecap='square'%20rx='1'/%3e%3crect%20width='12'%20height='19'%20stroke-linecap='square'%20rx='1'/%3e%3cpath%20stroke-linecap='round'%20d='M3.5%2017.5h5'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cg%20fill='%23000'%20transform='matrix(0%201%20-1%200%2010.705919%200)'%3e%3cpath%20d='m3.21420101%200h2.06354366l-.02130959%207h-2.98812649c-.50120858%200-.90751842-.40630984-.90751842-.90751843%200-.24832014.10175361-.48579383.28154626-.65707575l1.33209891-1.26904218c.1981146-.18873657.31023751-.45041026.31023751-.72403571v-.33484647c0-.18393675-.05073139-.36431009-.14661379-.52127917l-.71656606-1.17309042c-.26742442-.43780054-.12930727-1.00949833.30849328-1.27692274.14580813-.08906488.31335641-.13618913.48421473-.13618913z'/%3e%3cpath%20d='m7.93645634%200h2.06354366l-.02130959%207h-2.98812649c-.50120858%200-.90751842-.40630984-.90751842-.90751843%200-.24832014.10175361-.48579383.28154626-.65707575l1.33209891-1.26904218c.1981146-.18873657.31023751-.45041026.31023751-.72403571v-.33484647c0-.18393675-.05073139-.36431009-.14661379-.52127917l-.71656606-1.17309042c-.26742441-.43780054-.12930727-1.00949833.30849328-1.27692274.14580813-.08906488.31335641-.13618913.48421473-.13618913z'%20transform='matrix(-1%200%200%201%2014.722256%200)'/%3e%3c/g%3e%3cpath%20d='m3.5%205.205919h-3'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)
'%3e%3cpath%20d='m0%200h8v7h-8z'%20stroke-linecap='square'/%3e%3cpath%20d='m3.5%207.5-3%202'%20stroke-linecap='round'/%3e%3cpath%20d='m7.5%207.5-3%202'%20stroke-linecap='round'%20transform='matrix(-1%200%200%201%2012%200)'/%3e%3cpath%20d='m.5%201.5h7'%20stroke-linecap='square'/%3e%3cpath%20d='m4%207.5v2'%20stroke-linecap='round'/%3e%3c/g%3e%3c/svg%3e)

'%3e%3cpath%20d='m5.5%209.16666667c2.02504408%200%203.66666667-1.64162259%203.66666667-3.66666667s-1.64162259-3.66666667-3.66666667-3.66666667-3.66666667%201.64162259-3.66666667%203.66666667'%20transform='matrix(-.70710678%20-.70710678%20.70710678%20-.70710678%205.5%2013.278175)'/%3e%3cpath%20d='m7.38199597.90005919%201.68154328%202.50092851-2.45449601.99168076'%20transform='matrix(.92718385%20.37460659%20-.37460659%20.92718385%201.561954%20-2.742828)'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m2%202v6.5625c0%20.2416246.19187797.4375.42857143.4375h5.14285714c.23669346%200%20.42857143-.1958754.42857143-.4375v-6.5625z'/%3e%3cpath%20d='m10%201.5h-10'/%3e%3cpath%20d='m4%202h2v-1.5c0-.27614237-.14923842-.5-.33333333-.5h-1.33333334c-.18409491%200-.33333333.22385763-.33333333.5z'/%3e%3cg%20stroke-linecap='round'%20stroke-linejoin='round'%3e%3cpath%20d='m4%203.75v3.5'/%3e%3cpath%20d='m6%203.75v3.5'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)
'%3e%3cpath%20d='m1%201.906402%207%20.020001'%20transform='matrix(-1%200%200%201%209%200)'/%3e%3cpath%20d='m0%200%202%201.9809116-2%201.9454911'%20transform='matrix(-1%200%200%201%202%200)'/%3e%3cpath%20d='m7%200%202%201.9809116-2%201.9454911'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)
'%3e%3ccircle%20cx='1'%20cy='3'%20fill='%23fff'%20r='1'/%3e%3cg%20stroke='%23000'%20stroke-linejoin='round'%3e%3ccircle%20cx='1'%20cy='7'%20fill='%23000'%20r='1'%20stroke-linecap='square'/%3e%3cpath%20d='m5%207.5c0-2.48528137-2.01471863-4.5-4.5-4.5'%20stroke-linecap='round'/%3e%3cpath%20d='m8%207.5c0-4.14213562-3.35786438-7.5-7.5-7.5'%20stroke-linecap='round'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20cx='3.5'%20cy='3.5'%20r='3.5'%20stroke-linecap='square'/%3e%3cpath%20stroke-linecap='round'%20d='M6.5%206.5l3%203'/%3e%3c/g%3e%3c/svg%3e)


'%3e%3crect%20height='11'%20rx='2'%20stroke='%23000'%20stroke-linecap='square'%20stroke-linejoin='round'%20width='11'/%3e%3cpath%20d='m7%200h3c.5522847%200%201%20.44771525%201%201v9c0%20.5522847-.4477153%201-1%201h-3z'%20fill='%23000'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m1.66852629%202.64939417c-1.02277496.89671348-1.66852629%202.21297795-1.66852629%203.68006572%200%202.70200237%202.1904057%204.89240811%204.89240807%204.89240811s4.89240808-2.19040574%204.89240808-4.89240811c0-1.45820211-.63795282-2.76740236-1.64998402-3.66372632'/%3e%3cpath%20d='m4.892408.5v5'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m4.5%208.5v-5'%20stroke-linecap='round'/%3e%3cg%20fill='%23000'%20stroke-linecap='square'%3e%3cpath%20d='m6.57056285%203.81412325c.76706216%200%201.6153397-.40152509%202.54483263-1.20457526-.91502357-.79525351-1.75606644-1.19288027-2.52312859-1.19288027s-1.59268595.39762676-2.47687141%201.19288027c.8697161.80305017%201.68810522%201.20457526%202.45516737%201.20457526z'%20transform='matrix(.70710678%20-.70710678%20.70710678%20.70710678%20.088241%205.443822)'/%3e%3cpath%20d='m2.57056285%203.81412325c.76706216%200%201.6153397-.40152509%202.54483263-1.20457526-.91502357-.79525351-1.75606644-1.19288027-2.52312859-1.19288027s-1.59268595.39762676-2.4768714%201.19288027c.86971609.80305017%201.68810521%201.20457526%202.45516736%201.20457526z'%20transform='matrix(-.70710678%20-.70710678%20-.70710678%20.70710678%206.314122%202.615395)'/%3e%3c/g%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m4.1952172.2440215%202.67984379%203.34980474c.08625239.10781548.06877204.26513858-.03904344.35139096-.04432826.03546261-.09940589.0547828-.15617376.0547828h-5.35968758c-.13807119%200-.25-.11192881-.25-.25%200-.05676787.01932019-.1118455.0547828-.15617376l2.67984379-3.34980474c.08625238-.10781548.24357548-.12529582.35139096-.03904344.01441618.01153294.0275105.02462727.03904344.03904344z'%20fill='%23000'%20stroke-linecap='square'/%3e%3cpath%20d='m5.06666667%204%202.64158333%203.60215908c.08165028.1113413.05758096.26779189-.05376034.34944217-.04287924.03144478-.09466758.04839875-.14784091.04839875h-7.0132975c-.13807118%200-.25-.11192881-.25-.25%200-.05317333.01695398-.10496167.04839875-.14784092l2.64158333-3.60215908z'%20fill='%23000'%20stroke-linecap='square'/%3e%3cpath%20d='m4%207v3'%20stroke-linecap='round'/%3e%3c/g%3e%3c/svg%3e)
'/%3e%3c/svg%3e)


'%3e%3cpath%20d='m.454545.454545v9.09091'/%3e%3cpath%20d='m.909091%209.545455h9.090909'/%3e%3cpath%20d='m1.81818182%207.72727273%202.72727273-3.63636364%202.72727272%201.36363636%202.72727273-3.63636363'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3cpath%20d='m3.5%200h4c1.93299662%200%203.5%201.56700338%203.5%203.5v3.17636875c-.4576643%201.02904469-1.16674886%201.92539035-2.12725376%202.68903699-.9605049.76364666-2.0641562%201.30851136-3.31095391%201.63459426h-2.06179233c-1.93299662%200-3.5-1.56700338-3.5-3.5v-4c0-1.93299662%201.56700338-3.5%203.5-3.5z'%20stroke-linecap='square'/%3e%3cpath%20d='m5.5%2010.6468254c0-.5040695%200-1.08328438%200-1.73764475%200-.98154054%201.19221416-2.30918065%202.62550241-2.30918065h2.62550239'/%3e%3c/g%3e%3c/svg%3e)



'%3e%3crect%20height='12'%20rx='3'%20width='12'/%3e%3ccircle%20cx='8'%20cy='4'%20r='2'/%3e%3cpath%20d='m4.66959966%206.27135946%202.13915047%203.42264075c.05854207.09366731.03006743.21705738-.06359987.27559945-.03178632.01986645-.06851585.03040034-.10599979.03040034h-4.27830094c-.11045695%200-.2-.08954305-.2-.2%200-.03748395.01053389-.07421347.03040034-.10599979l2.13915047-3.42264075c.05854206-.09366731.18193214-.12214194.27559945-.06359987.02575383.01609614.04750373.03784604.06359987.06359987z'/%3e%3c/g%3e%3c/svg%3e)

'%3e%3ccircle%20cx='6'%20cy='6'%20r='6'%20stroke-linecap='square'/%3e%3cpath%20d='m8.4%206.62767337h-2.4v-3.62767337'%20stroke-linecap='round'/%3e%3c/g%3e%3c/svg%3e)
'%3e%3ccircle%20cx='6'%20cy='6'%20r='3.5'%20stroke='%23000'/%3e%3cg%20fill='%23000'%3e%3cg%3e%3ccircle%20cx='11.5'%20cy='6'%20r='1'/%3e%3ccircle%20cx='.5'%20cy='6'%20r='1'/%3e%3c/g%3e%3cg%20transform='matrix(0%20-1%201%200%205.5%2012)'%3e%3ccircle%20cx='11.5'%20cy='.5'%20r='1'/%3e%3ccircle%20cx='.5'%20cy='.5'%20r='1'/%3e%3c/g%3e%3cg%20transform='matrix(.70710678%20-.70710678%20.70710678%20.70710678%201.403806%209.889087)'%3e%3ccircle%20cx='11.5'%20cy='.5'%20r='1'/%3e%3ccircle%20cx='.5'%20cy='.5'%20r='1'/%3e%3c/g%3e%3cg%20transform='matrix(-.70710678%20-.70710678%20.70710678%20-.70710678%209.889087%2010.596194)'%3e%3ccircle%20cx='11.5'%20cy='.5'%20r='1'/%3e%3ccircle%20cx='.5'%20cy='.5'%20r='1'/%3e%3c/g%3e%3c/g%3e%3c/g%3e%3c/svg%3e)

'%3e%3cpath%20d='m5.5%209.16666667c2.02504408%200%203.66666667-1.64162259%203.66666667-3.66666667s-1.64162259-3.66666667-3.66666667-3.66666667-3.66666667%201.64162259-3.66666667%203.66666667'%20transform='matrix(-.70710678%20-.70710678%20.70710678%20-.70710678%205.5%2013.278175)'/%3e%3cpath%20d='m7.38199597.90005919%201.68154328%202.50092851-2.45449601.99168076'%20transform='matrix(.92718385%20.37460659%20-.37460659%20.92718385%201.561954%20-2.742828)'/%3e%3c/g%3e%3c/svg%3e)

'%3e%3cpath%20d='m5.5%209.16666667c2.5313051%200%205.5-3.07829276%205.5-4.58333334s-2.9686949-4.58333333-5.5-4.58333333-5.5%203.06404559-5.5%204.58333333c0%201.51928775%202.9686949%204.58333334%205.5%204.58333334z'/%3e%3cpath%20d='m5.5%205c1.81818182%200%203.48484848-.27777778%205-.83333333-1.79920903-2.77777778-3.46587569-4.16666667-5-4.16666667-1.5341243%200-3.20079097%201.38888889-5%204.16666667%201.51515152.55555555%203.18181818.83333333%205%20.83333333z'%20fill='%23000'/%3e%3ccircle%20cx='5.5'%20cy='4.5'%20r='2.5'/%3e%3cpath%20d='m6.36695623%206.74143801c.81451493%200%201.25015286-.91483479%201.44118777-1.37071901%200-.81451492-.51881935-1.370719-1.33333427-1.370719s-1.47480973.66029481-1.47480973%201.47480973.55244131%201.26662828%201.36695623%201.26662828z'%20fill='%23000'/%3e%3c/g%3e%3c/svg%3e)
'%20stroke='%23000'%20fill='none'%20fill-rule='evenodd'%20stroke-linecap='square'%20stroke-linejoin='round'%3e%3cpath%20d='M5.5%209.167c2.531%200%205.5-3.079%205.5-4.584C11%203.078%208.031%200%205.5%200S0%203.064%200%204.583c0%201.52%202.969%204.584%205.5%204.584z'/%3e%3ccircle%20cx='5.5'%20cy='4.5'%20r='2.5'/%3e%3cpath%20d='M6.367%206.741c.814%200%201.25-.914%201.441-1.37C7.808%204.556%207.29%204%206.475%204%205.66%204%205%204.66%205%205.475c0%20.814.552%201.266%201.367%201.266z'%20fill='%23000'/%3e%3c/g%3e%3c/svg%3e)









